
AFGBV
Ausfertigungsdatum: 24.06.2022
Vollzitat:
"Autonome-Fahrzeuge-Genehmigungs-und-Betriebs-Verordnung vom 24. Juni 2022 (BGBl. I S. 986), die durch Artikel 8 des Gesetzes vom 12. Mai 2026 (BGBl. 2026 I Nr. 142) geändert worden ist"
| Stand: | Geändert durch Art. 8 G v. 12.5.2026 I Nr. 142 |
(+++ Textnachweis ab: 1.7.2022 +++)Die V wurde als Artikel 1 der V v. 24.6.2022 I 986 vom Bundesministerium für Digitales und Verkehr im Einvernehmen mit dem Bundesministerium der Justiz und dem Bundesmisterium für Wirtschaft und Klimaschutz mit Zustimmung des Bundesrates beschlossen. Sie ist gem. Art. 4 dieser V am 1.7.2022 in Kraft getreten.
 |
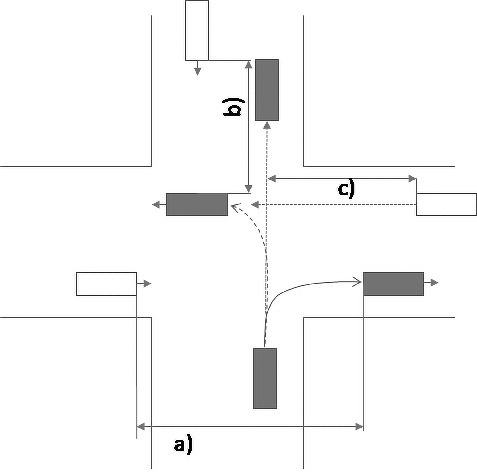
| TTCSpurwechsel | Zeit bis zum Aufprall (TTC) zum Zeitpunkt des Eindringens in den Fahrstreifen des Kraftfahrzeugs mit autonomer Fahrfunktion in Sekunden. Als Eindringen wird ein Überschreiten der Außenkante des Fahrsteifens um mehr als 30 Zentimeter gewertet. | |
| νrel | Relativgeschwindigkeit in Meter pro Sekunde [m/s]. Positiv für Annäherung des Kraftfahrzeugs mit autonomer Fahrfunktion an einen einscherenden Verkehrsteilnehmenden, der sich langsamer fortbewegt. | |
| τ | Zeit in Sekunden, die bis zum Erreichen der Verzögerung α in Meter pro Sekunde-Quadrat vergeht. | Typische Werte sind 0,5 Sekunden bis zum Erreichen von 10 Sekunde-Quadrat. Für geringere mögliche Verzögerungen des Kraftfahrzeugs mit autonomer Fahrfunktion sind die Werte entsprechend zu skalieren. Für 6 Sekunde-Quadrat wird daher davon ausgegangen, dass diese Verzögerung in 0,3 Sekunden erreicht wird, 2,4 Sekunde-Quadrat in 0,12 Sekunden. |
| τReaktion | Zeit in Sekunden, die für die Einleitung einer Bremsreaktion erforderlich ist. | 0,1 Sekunden |
| α | Verzögerung in Meter pro Sekunde-Quadrat. | 2,4 Sekunde-Quadrat für Kraftfahrzeuge mit autonomer Fahrfunktion, die für die Beförderung von stehenden oder nicht angegurteten Fahrzeuginsassen ausgelegt sind, 6 Sekunde-Quadrat für übrige Kraftfahrzeuge mit autonomer Fahrfunktion. |
| vrel [Kilometer pro Stunde] | TTCSpurwechsel [Sekunde] für Kraftfahrzeuge mit autonomer Fahrfunktion mit stehend beförderten Fahrzeuginsassen | TTCSpurwechsel [Sekunde] für übrige Kraftfahrzeuge mit autonomer Fahrfunktion |
| 10 | 0,74 | 0,48 |
| 20 | 1,32 | 0,71 |
| 30 | 1,9 | 0,94 |
| 40 | 2,47 | 1,18 |
| 50 | 3,05 | 1,41 |
| 60 | 3,63 | 1,64 |
| Zeitpunkt | Beschreibung |
|---|---|
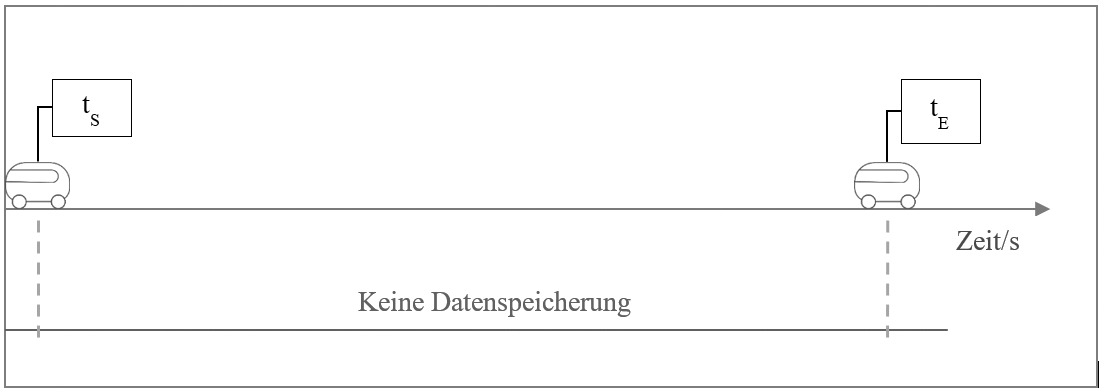
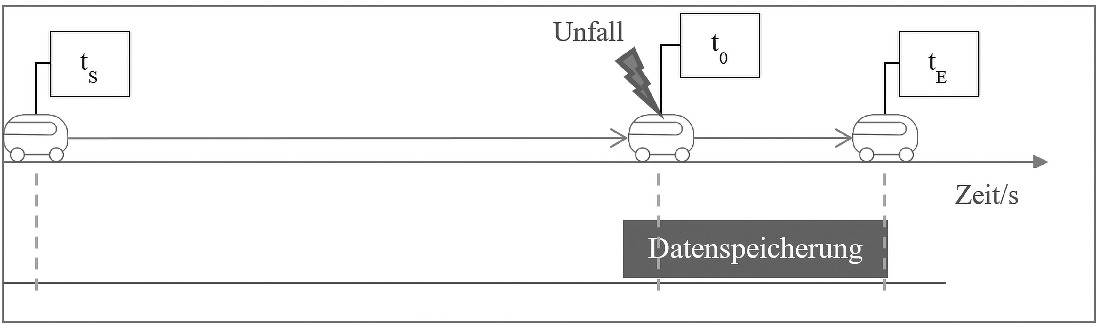
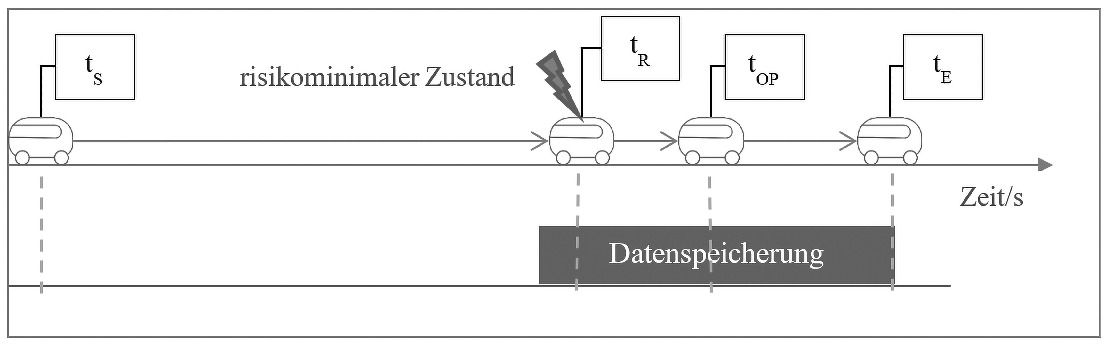
| tS | Beginn der Fahrt (Starten des Kraftfahrzeugs) |
| tE | Ende der Fahrt |
| t0 | Unfallereignis |
| t0P | Anforderung oder Eingabe der Technischen Aufsicht |
| tR | Auslösung des risikominimalen Zustands |
| Daten | Beispiel Dateiformat | ||
|---|---|---|---|
| 1. | Fahrzeugidentifizierungsnummer | Alphanummerische Zeichen [A-Z; 0-9] Beispiel: AAAAAA654398GFRDE | |
| 2. | Positionsdaten | Breiten- und Längengrad [±ddd.ddddd, Angabe in ± Graden (°) und Dezimalgraden, 5 Nachkommastellen] Höhenangaben in Meter Ausgabe im Globalen Positionsbestimmungssystem – Austauschformat als Abfolge von Punkten, in denen eine Änderung der Fortbewegungsrichtung erfolgt; Angabe des (Karten-)Bezugssystems. | |
| 3. | Anzahl und Zeiten der Nutzung sowie der Aktivierung/Deaktivierung der autonomen Funktion | Datum (Jahr:Monat:Tag), Zeit (Stunde:Minute:Sekunde), Beispiel: 2019-07-16, 05:25:12 | |
| 4. | Anzahl und Zeit der Freigabe von alternativen Fahrmanöver | Anzahl, Einzelzeiten (Stunde:Minute:Sekunde) | |
| 5. | Systemüberwachungsdaten (Beginn/ Ende) samt Softwarestand | Alphanummerische Zeichen [A-Z; 0-9] samt Erklärung Beispiel: P0601 Motorsteuergerät – Speicher Prüfsummenfehler | |
| 6. | Umwelt- und Wetterbedingungen | Temperatur/°C, Helligkeit/Beleuchtungsstärke/lux, Stellung des Scheibenwischers an/aus | |
| 7. | Vernetzung | Vernetzungsparameter wie beispielsweise Übertragungslatenz und verfügbare Bandbreite | |
| 8. | Name der aktivierten/deaktivierten passiven und aktiven Sicherheitssysteme, Zustand, auslösende Instanz (System oder extern) | Name des Systems, Zustand, Instanz Beispiel: Notbremssystem, aktiv, Systemfunktionsfähigkeit | |
| 9. | Fahrzeugbeschleunigung in Längs- und Querrichtung | Nummerische Werte in Meter pro Sekunde zum Quadrat | |
| 10. | Geschwindigkeit | Nummerischer Wert in Meter pro Sekunde | |
| 11. | Status der lichttechnischen Einrichtungen | Beispiel: Blinken an/aus Tagfahrlicht an/aus | |
| 12. | Spannungsversorgung des autonomen Kraftfahrzeugs | Nummerischer Wert in Volt | |
| 13. | Von extern an das Fahrzeug gesendete Befehle und Informationen | Gesendetes Format der Befehle sowie Metadaten zu Informationen: Dateigröße, Dateiformat, Quelle, Ziel, Übertragungszeit | |